Hi, I’m looking at trades that might be asked for to the SCOC by the Solar System community and trying to understand the scale of what such a request would be. In the current baseline footprint, I’m trying to estimate the number of LSSTCam pointings needed to cover the parts of the LSST footprint that are part of the NES mini-survey. How’s the best way to estimate this account for the overlapping pointings.
To answer this here for future use:
A general approach to this is to look at the area defined (however is appropriate) and then convert to “approximate number of pointings required” by dividing by 9.6 sqdeg (the camera area) then dividing by 0.9 – the tessellation has an overlap of about 10%, although we also have a fill factor of about 90% … in practice, in order to ensure a given area is covered all the way to the edges (including visits which are only partly within your area of interest), it’s reasonable to calculate “approximate number of pointings” by
n_pointings = area / 9.6 * 1.3
But then, the other part of Meg’s question is to understand how the NES is defined in the survey footprint.
That is best understood by taking the current footprint and looking at what parts are aimed at “NES” –
import healpy as hp
from rubin_scheduler.scheduler.utils import get_current_footprint
nside = 32
maps, labels = get_current_footprint(nside=nside)
area = len(np.where(labels == "nes")[0]) * hp.nside2pixarea(nside, degrees=True)
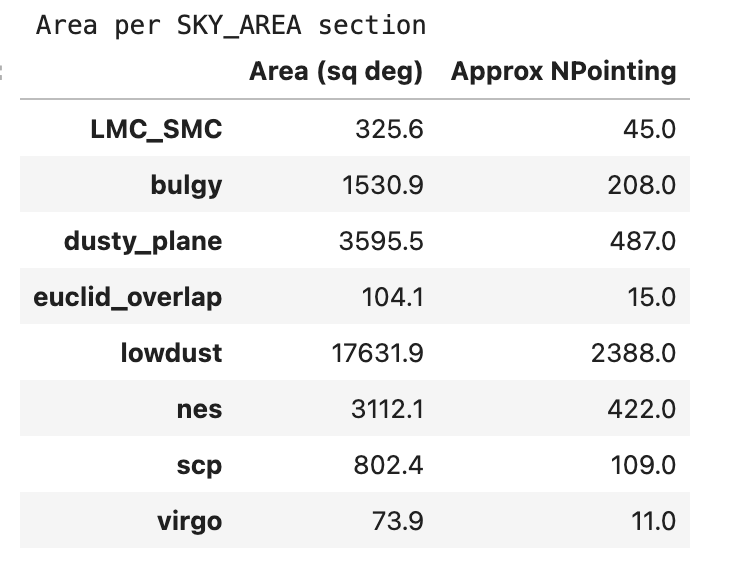
For the v3.4 baseline survey footprint:
A python notebook implementing this is at survey-strategy_lsst_io/notebooks/SurveyAreas.ipynb at main · lsst/survey-strategy_lsst_io · GitHub
Question @ljones - what is the blugy? That’s the only region that I’m not familiar with? Is that the spot in the bulge that gets more visits? Same question for the euclid overlap. I’m not sure where that is looking around at Mini-Surveys — Observing Strategy
You’re right that “bulgy” is what the galactic plane region that receives WFD-level visits is called (it includes the bulge, but also some other regions).
The Euclid overlap is also a WFD-level region, it’s a very small extension that makes the lower declination limit of the WFD in the area near the LMC-SMC match with the lower limit of the Euclid footprint.
To find the entire region that is programmed at “WFD-level of visits”, you would combine the lowdust, euclid_overlap, virgo, LMC_SMC, and bulgy regions.